jeudi 15 avril 2021
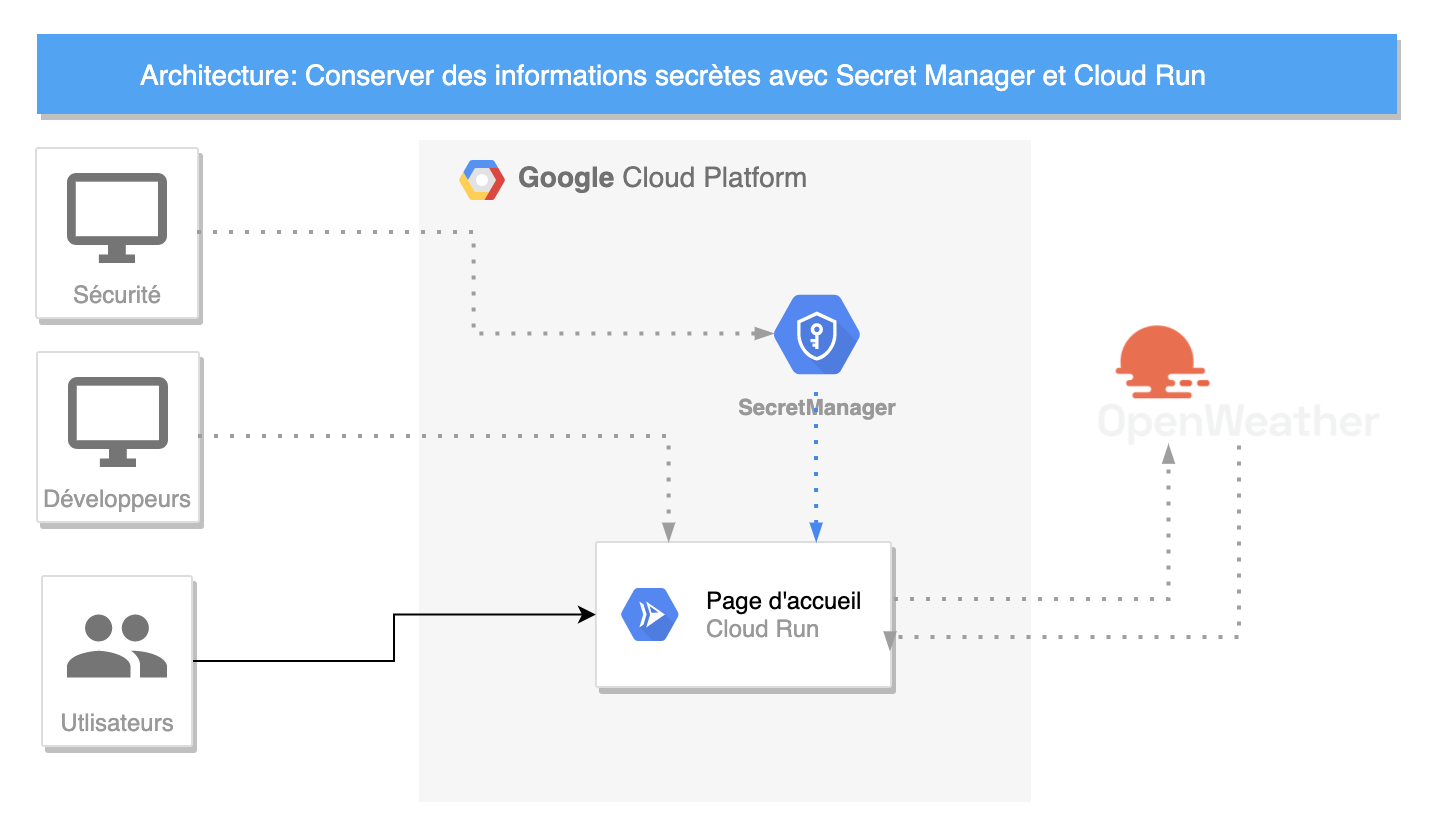
Conserver des informations secrètes avec Secret Manager et Cloud Run Lorsque nous développ...
lundi 22 mars 2021
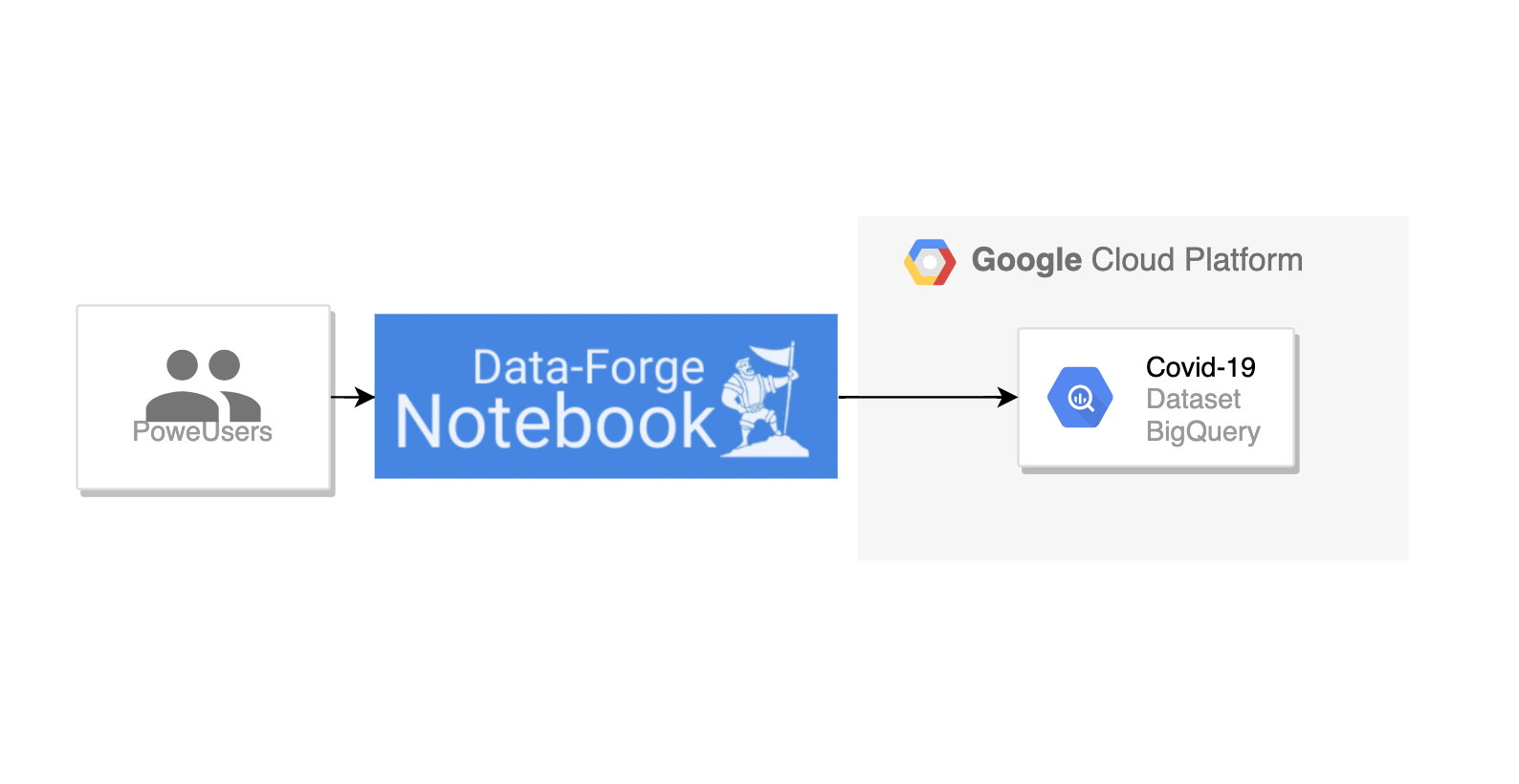
BigQuery et Data-Forge Notebook Dans cet article, nous allons utiliser la librairie Javasc...
jeudi 04 mars 2021
Insérer la date et l’heure dans un microservice Cloud Run à l’aide de Cloud Build Dans l’a...
mercredi 24 février 2021
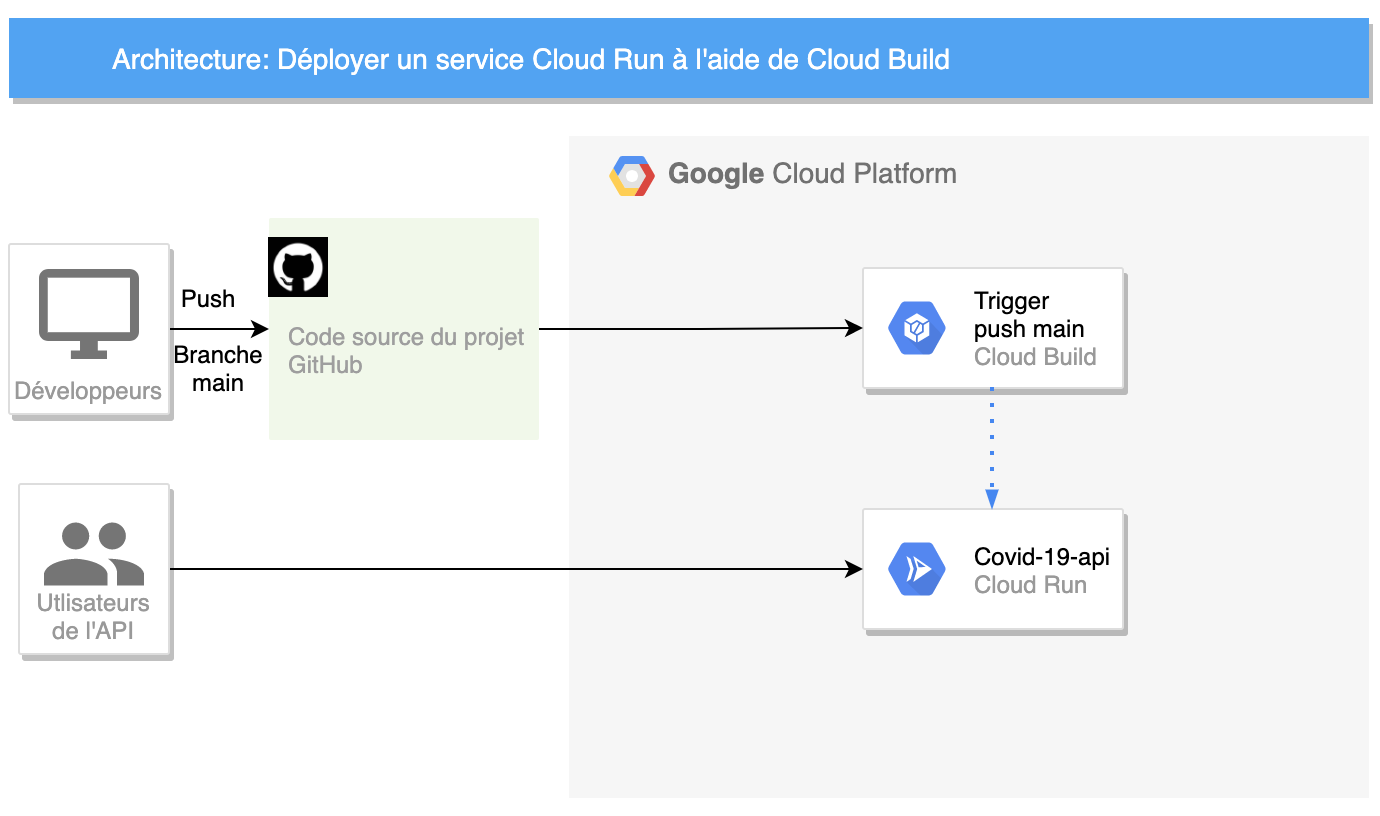
Déployer Cloud Run Covid 19 API avec de Cloud Build Dans cet article, nous allons automati...
jeudi 18 février 2021
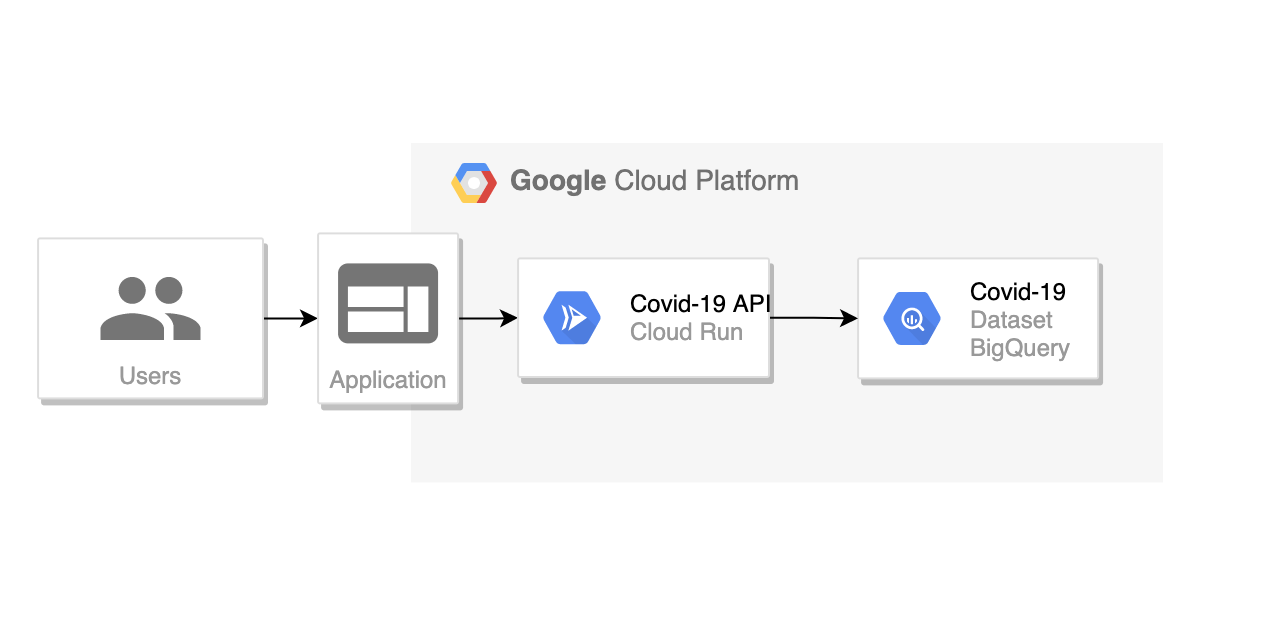
Rendre disponible des données d’un ensemble BigQuery à l’aide de Cloud Run Introduction Ce...
dimanche 31 janvier 2021
Interroger l'ensemble de données COVID19 à l'aide de BigQuery Cet article est une démonstr...